Asuro
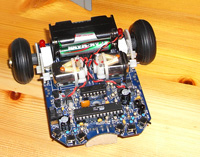 ASURO (Another Small and Unique Robot from Oberpfaffenhofen) ist ein frei in C programmierbarer Roboter, der vom Institut für Robotik und Mechatronik
(am Deutschen Zentrum für Luft- und Raumfahrt) in Oberpfaffenhofen entwickelt wurde.
[Quelle: Wikipedia, Stichwort: Asuro]
ASURO (Another Small and Unique Robot from Oberpfaffenhofen) ist ein frei in C programmierbarer Roboter, der vom Institut für Robotik und Mechatronik
(am Deutschen Zentrum für Luft- und Raumfahrt) in Oberpfaffenhofen entwickelt wurde.
[Quelle: Wikipedia, Stichwort: Asuro]
Geradeausfahrt
Da der ASURO von zwei kleinen Elektromotoren angetrieben wird, ist eine genaue Bestimmung der Fahrtweite jedes einzelnen Rades per Ansteuerung beider Motoren mit der gleicher Spannung über die Motorsteuerung nicht möglich. Bei beiden Rädern lässt sich die Kraftübertragung über die Zahnräder nicht so exakt einstellen, dass der ASURO eine gerade Strecke fahren würde.
Der ASURO wird also bei gleicher Spannungsversorgung der Motoren nicht geradeaus fahren, sondern immer eine leichte Kurve machen.
Um dieses zu verhindern, wurde der ASURO mit Sensoren an den Antriebszahnrädern ausgestattet, die durch Unterscheidung der Helligkeit erkennen sollen,
wie weit sich das Rad bewegt. Darüber soll gesteuert werden, wie weit jedes einzelne Rad gefahren ist, um später per Steuerung auswerten zu können,
welches Rad schneller und welches langsamer fahren muss um eine Geradeausfahrt zu ermöglichen.
Bei den ersten Tests der Sensoren wurde schnell klar, dass diese leider sehr ungenau arbeiten und teilweise auch bei sehr langsamer Fahrt oder im Stand
bereits unrealistische Werte liefern. Dieses könnte evtl. daran liegen, dass Umgebungslicht mit in die Sensoren trifft und somit das Messergebnis
verfälscht wird.
Linienverfolgung
Um einer Linie zu folgen, sind vorne am ASURO Sensoren zur Helligkeitermittlung angebracht. Diese liefern im Gegensatz zu den Sensoren an dem Antrieb bereits ohne Abdeckung sehr brauchbare Werte. Mithilfe der Sensoren ist es recht schnell möglich, einen kleinen Parcour mit einer schwarzen Linie zu verfolgen und der ASURO fährt darauf ohne Probleme. Auch ein Feststellen von Hindernissen auf der Strecke habe ich schon teilweise mit implementiert, so dass der ASURO, sobald er auf ein Hinderniss stößt, ein kleines Stückchen zurücksetzt und sich dann dreht, bis er eine neue Linie gefunden hat. In der Regel ist dies dann eine 180° Drehung bevor er die Verfolgung der Linie wieder aufnimmt. Denkbar wäre in Zusammenarbeit mit den Odometrie-Daten das Hindernis zu umfahren oder anhand der Anstoßstelle zu ermitteln, wo das Hinderniss liegt, um sich an dem Hindernis "herumzutasten". Sehr hilfreich ist hier sicherlich auch eine Erkennung des Abstandes zu dem Hindernis, welches mit Bordmitteln des ASUROs leider nicht möglich ist, aber durch zusätzliche Sensoren möglich gemacht werden könnte. Damit wäre ein frühzeitiges Erkennen von Hindernissen und ein langsames Abbremsen möglich.